
 Latest images
Latest imagesHAG 01
5 posters
RigidChips :: Rigid-Chips :: Files :: Others
Page 1 of 1

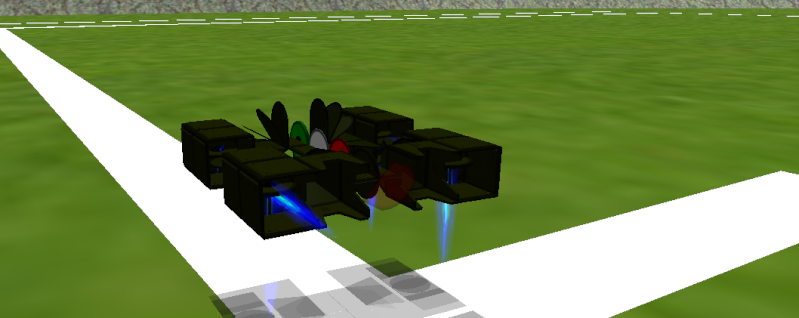
HAG 01
![]() by Echo_Delta_Oscar Fri Sep 16, 2011 7:41 am
by Echo_Delta_Oscar Fri Sep 16, 2011 7:41 am
Since my first online RigidChips experience, I've met a few japanese users who simply spent online time testing their models with me. It happened one day that one of them fired at me. I have never been able to cause any significant damage with any of my armed models -planes were difficult to aim and equipped with weak weapons, tanks were slow and with waek armor, etc.-, until I built the HAG series. With this -no kidding- I battled two guys who were operating turrets which tore one of my plane apart in a few shots, and I won (half of the armour was already gone).
Commands:
Arrow Keys to move forward, backward and sideway.
A,D to steer
W,S to change elevation
Q to fire
X to Switch all engines on and off
The propulsive jets act as recoil dampers when fireing.
I'm trying to upgrade the model in order to make relocation easier -due to control priorities, it is inherently slow-, suggestion welcome.
- Code:
Val{
HoverNE(default=0)
HoverSE(default=0)
HoverNW(default=0)
HoverSW(default=0)
Proportion(default=0, min=0, max=1000)
FWNE(default=0, min=-50000, max=150000)
FWNW(default=0, min=-50000, max=150000)
FWSE(default=0, min=-50000, max=150000)
FWSW(default=0, min=-50000, max=150000)
FSJ(default=0, min=-50000, max=50000)
MSJ(default=0, min=-50000, max=50000)
RSJ(default=0, min=-50000, max=50000)
Front(default=0, min=-50000, max=150000, step=10000)
Side(default=0, min=-40000, max=40000, step=40000)
Turn(default=0, min=-40000, max=40000, step=40000)
Ster(default=0, min=-40, max=40, step=4)
Up(default=0, min=-16, max=16, step=0)
Ign(default=0, min=0, max=1, step=0)
Gtim(default=0, min=0, max=20, step=20)
TrigBLK(default=0, min=0, max=50000000, step=50000000)
TrigBL(default=0, min=0, max=50000000, step=50000000)
TrigY(default=0, min=0, max=50000000, step=50000000)
TrigR(default=0, min=0, max=50000000, step=50000000)
}
Key{
0:Front(step=10000)
1:Front(step=-10000)
7:Turn(step=5000)
9:Turn(step=-5000)
15:Up(step=-1)
8:Up(step=1)
2:Side(step=5000)
3:Side(step=-5000)
}
Body{
Core(){ N:Weight(angle=180, color=#202500){
N:TrimF(angle=45, option=1){
S:Cowl(effect=#ffff){S:Cowl(option=5, color=#500000, effect=#a000){}}}
N:TrimF(angle=-45, option=1){
S:Cowl(effect=#ffff){S:Cowl(option=5, color=#500000, effect=#a000){}}}}
S:TrimF(angle=90, option=1){N:Jet(name=FC, power=FSJ, color=#202500){}}
E:TrimF(angle=-90, option=1){
N:Arm(angle=-90, power=TrigBLK, option=50000, color=#202500){
S:Cowl(angle=-25, option=5, color=#101500){}}
S:Arm(angle=-90, power=TrigY, option=50000, color=#202500){
N:Cowl(angle=-25, option=5, color=#101500){}}
E:Arm(angle=-90, power=TrigR, option=50000, color=#202500){
W:Cowl(angle=-25, option=5, color=#101500){}}
W:Arm(angle=-90, power=TrigBL, option=50000, color=#202500){
E:Cowl(angle=-25, option=5, color=#101500){}}
E:Jet(name=FNE, power=FWNE, color=#202500){
N:Weight(angle=90, color=#202500){}
S:Weight(angle=90, color=#202500){}
E:Weight(angle=90, color=#202500){}
W:Weight(angle=90, color=#202500){}
N:Weight(angle=-90, color=#202500){}
S:Weight(angle=-90, color=#202500){}
E:Weight(angle=-90, color=#202500){}}}
W:TrimF(angle=90, option=1){
N:Arm(angle=-90, power=TrigBLK, option=50000, color=#202500){
S:Cowl(angle=-25, option=5, color=#101500){}}
S:Arm(angle=-90, power=TrigY, option=50000, color=#202500){
N:Cowl(angle=-25, option=5, color=#101500){}}
E:Arm(angle=-90, power=TrigBL, option=50000, color=#202500){
W:Cowl(angle=-25, option=5, color=#101500){}}
W:Arm(angle=-90, power=TrigR, option=50000, color=#202500){
E:Cowl(angle=-25, option=5, color=#101500){}}
W:Jet(name=FNW, power=FWNW, color=#202500){
N:Weight(angle=90, color=#202500){}
S:Weight(angle=90, color=#202500){}
E:Weight(angle=90, color=#202500){}
W:Weight(angle=90, color=#202500){}
N:Weight(angle=-90, color=#202500){}
S:Weight(angle=-90, color=#202500){}
W:Weight(angle=-90, color=#202500){}}}
E:Frame(option=1){E:Jet(name=JetNE, power=HoverNE, color=#202500){}}
W:Frame(option=1){W:Jet(name=JetNW, power=HoverNW, color=#202500){}}
S:Weight(color=#202500){S:Weight(color=#202500){
S:Weight(option=4, color=#202500){
S:TrimF(angle=90, option=1){N:Jet(name=RC, power=RSJ, color=#00ff00){
N:Cowl(option=2){N:Cowl(option=2, color=#ff0000){}}}}
E:TrimF(angle=-90, option=1){E:Jet(name=FSE, power=FWSE, color=#202500){
N:Weight(angle=90, color=#202500){}
S:Weight(angle=90, color=#202500){}
E:Weight(angle=90, color=#202500){}
W:Weight(angle=90, color=#202500){}
N:Weight(angle=-90, color=#202500){}
S:Weight(angle=-90, color=#202500){}
E:Weight(angle=-90, color=#202500){}
W:Weight(angle=-90, color=#202500){}}}
W:TrimF(angle=90, option=1){W:Jet(name=FSW, power=FWSW, color=#202500){
N:Weight(angle=90, color=#202500){}
S:Weight(angle=90, color=#202500){}
E:Weight(angle=90, color=#202500){}
W:Weight(angle=90, color=#202500){}
N:Weight(angle=-90, color=#202500){}
S:Weight(angle=-90, color=#202500){}
E:Weight(angle=-90, color=#202500){}
W:Weight(angle=-90, color=#202500){}}}
E:Cowl(angle=-30, option=5, color=#101500){}
E:Cowl(angle=-60, option=5, color=#101500){}
E:Cowl(angle=-90, option=5, color=#101500){}
W:Cowl(angle=-30, option=5, color=#101500){}
W:Cowl(angle=-60, option=5, color=#101500){}
W:Cowl(angle=-90, option=5, color=#101500){}
E:Cowl(angle=30, option=5, color=#101500){}
W:Cowl(angle=30, option=5, color=#101500){}
E:Frame(option=1){
N:Cowl(option=3, color=#101500){E:Cowl(option=5, color=#101500){}
S:Cowl(color=#101500){}}S:Cowl(option=4, color=#101500){E:Cowl(option=5, color=#101500){}}
E:Jet(name=JetSE, power=HoverSE, color=#202500){}}
W:Frame(option=1){
N:Cowl(option=4, color=#101500){W:Cowl(option=5, color=#101500){}
S:Cowl(color=#101500){}}S:Cowl(option=3, color=#101500){W:Cowl(option=5, color=#101500){}}
W:Jet(name=JetSW, power=HoverSW, color=#202500){}}
}}}
}
}
Script{
print 1,"Weight: ",_WEIGHT()
print 2,"Fuel: ",_FUEL()," LVL: ",_FUEL()/2286400," %"
print 3,"Speed: ", _VEL()," m/s, ",_VEL()*36/10," km/h, ",_VEL()*3600/1852," kts"
Print 5,"Engine: ",Front/1500," %"
print 6,"Elevation: ",Up
Ign=_MOD(Ign+_KEYDOWN(5),2)
if Ign=0{
Proportion=Proportion-15}
if Ign=1{
Proportion=Proportion+5}
if _H()>(0){
print 4,"Altitude: ",_H()
FWNE=(Front*5+Turn*4-_VY(FNE)*43000)*Proportion/1000
FWNW=(Front*5-Turn*4-_VY(FNW)*43000)*Proportion/1000
FWSE=(Front*5+Turn*4-_VY(FSE)*43000)*Proportion/1000
FWSW=(Front*5-Turn*4-_VY(FSW)*43000)*Proportion/1000
FSJ=(Side*10+Turn-_VY(FC)*30000+(_VY(RC)-_VY(FC))*5000)*Proportion/1000
RSJ=(Side*10-Turn-_VY(RC)*30000+(_VY(FC)-_VY(RC))*5000)*Proportion/1000
HoverNE=(_WEIGHT()*981*6/300+(2-_H(JetNE))*300000-_VY(JetNE)*30000+(_Y(JetSE)-_Y(JetNE)+Up/4)*10000+(_Y(JetNW)-_Y(JetNE))*10000)*Proportion/1000
HoverSE=(_WEIGHT()*981*6/300+(2-_H(JetSW))*300000-_VY(JetSE)*30000+(_Y(JetNE)-_Y(JetSE))*10000+(_Y(JetSW)-_Y(JetSE))*10000)*Proportion/1000
HoverNW=(_WEIGHT()*981*6/300+(2-_H(JetNW))*300000-_VY(JetNW)*30000+(_Y(JetSW)-_Y(JetNW)+Up/4)*10000+(_Y(JetNE)-_Y(JetNW))*10000)*Proportion/1000
HoverSW=(_WEIGHT()*981*6/300+(2-_H(JetSW))*300000-_VY(JetSW)*30000+(_Y(JetNW)-_Y(JetSW))*10000+(_Y(JetSE)-_Y(JetSW))*10000)*Proportion/1000}
if _H()<(0){
print 4,"Altitude: ",_Y()
FWNE=(Front*5+Turn*4-_VY(FNE)*43000)*Proportion/1000
FWNW=(Front*5-Turn*4-_VY(FNW)*43000)*Proportion/1000
FWSE=(Front*5+Turn*4-_VY(FSE)*43000)*Proportion/1000
FWSW=(Front*5-Turn*4-_VY(FSW)*43000)*Proportion/1000
FSJ=(Side*10+Turn-_VY(FC)*30000+(_VY(RC)-_VY(FC))*5000)*Proportion/1000
RSJ=(Side*10-Turn-_VY(RC)*30000+(_VY(FC)-_VY(RC))*5000)*Proportion/1000
HoverNE=(_WEIGHT()*981*6/300+(2-_Y(JetNE))*300000-_VY(JetNE)*30000+(_Y(JetSE)-_Y(JetNE)+Up/4)*10000+(_Y(JetNW)-_Y(JetNE))*10000)*Proportion/1000
HoverSE=(_WEIGHT()*981*6/300+(2-_Y(JetSW))*300000-_VY(JetSE)*30000+(_Y(JetNE)-_Y(JetSE))*10000+(_Y(JetSW)-_Y(JetSE))*10000)*Proportion/1000
HoverNW=(_WEIGHT()*981*6/300+(2-_Y(JetNW))*300000-_VY(JetNW)*30000+(_Y(JetSW)-_Y(JetNW)+Up/4)*10000+(_Y(JetNE)-_Y(JetNW))*10000)*Proportion/1000
HoverSW=(_WEIGHT()*981*6/300+(2-_Y(JetSW))*300000-_VY(JetSW)*30000+(_Y(JetNW)-_Y(JetSW))*10000+(_Y(JetSE)-_Y(JetSW))*10000)*Proportion/1000}
if Ign=1 & _KEY(14)>(0){
Gtim=Gtim+1}
if Gtim=3{
TrigBL=0
TrigR=0
TrigY=0
TrigBLK=50000000}
if Gtim=6{
TrigBLK=0
TrigR=0
TrigY=0
TrigBL=50000000}
if Gtim=9{
TrigBLK=0
TrigBL=0
TrigR=0
TrigY=50000000}
if Gtim=12{
TrigBLK=0
TrigBL=0
TrigY=0
TrigR=50000000
Gtim=0}
Commands:
Arrow Keys to move forward, backward and sideway.
A,D to steer
W,S to change elevation
Q to fire
X to Switch all engines on and off
The propulsive jets act as recoil dampers when fireing.
I'm trying to upgrade the model in order to make relocation easier -due to control priorities, it is inherently slow-, suggestion welcome.
Last edited by Echo_Delta_Oscar on Mon Sep 19, 2011 3:14 pm; edited 3 times in total (Reason for editing : Bug fixed)

Echo_Delta_Oscar- Hover

- Posts : 105
Join date : 2011-03-24
Re: HAG 01
![]() by Rainman Sun Sep 18, 2011 4:00 pm
by Rainman Sun Sep 18, 2011 4:00 pm
WOW!
Just... WOW!
Now that I finally figured how this thing works and remapped the controls more to my taste, I am... absolutely blown away. This is without doubt the best gunship I have ever seen. It is fast, nimble in the extreme, ludicrously tough, has massive firepower, and pinpoint accuracy. It's practically perfect.
The only, and I do mean only thing I can possibly think of that would improve this vehicle would be an altitude control mechanism, so that one can engage high-altitude aerial targets..
Just... WOW!
Now that I finally figured how this thing works and remapped the controls more to my taste, I am... absolutely blown away. This is without doubt the best gunship I have ever seen. It is fast, nimble in the extreme, ludicrously tough, has massive firepower, and pinpoint accuracy. It's practically perfect.
The only, and I do mean only thing I can possibly think of that would improve this vehicle would be an altitude control mechanism, so that one can engage high-altitude aerial targets..

Rainman- Tank

- Posts : 80
Join date : 2011-02-14
Age : 31
Location : New England, US
Re: HAG 01
![]() by Echo_Delta_Oscar Mon Sep 19, 2011 12:21 am
by Echo_Delta_Oscar Mon Sep 19, 2011 12:21 am
Very true: a guy tricked me using another overcraft with a slightly higher default attitude, just like a mosquito vs. a tarantula. So far I've switched to a wider elevation, but I shoul really think about a variable altitude control.
Echo_Delta_Oscar- Hover
- Posts : 105
Join date : 2011-03-24

freek4ever- Tank
- Posts : 97
Join date : 2011-08-26
Age : 27
Location : nederland holand
freek4ever- Tank
- Posts : 97
Join date : 2011-08-26
Age : 27
Location : nederland holand
Re: HAG 01
![]() by freek4ever Mon Dec 19, 2011 10:15 am
by freek4ever Mon Dec 19, 2011 10:15 am
and id is not easie to mantain tat angle kontrol whit variable alt if you get obove 10 meter
freek4ever- Tank
- Posts : 97
Join date : 2011-08-26
Age : 27
Location : nederland holand
Re: HAG 01
![]() by freek4ever Wed Dec 21, 2011 1:14 pm
by freek4ever Wed Dec 21, 2011 1:14 pm
HOW DID YOU MADE IT STABLE EN NOD SHAKING LIKE THIS
- Code:
// [RCD]
Val
{
A(default=0, min=-100000, max=1000000)
B(default=0, min=-100000, max=1000000)
C(default=0, min=-100000, max=1000000)
D(default=0, min=-100000, max=1000000)
H(default=0, max=2)
OP(default=100000, min=-100000, max=1000000)
PO(default=0, min=-100000, max=1000000)
SS1(default=0, min=-100000, max=1000000)
SS2(default=0, min=-100000, max=1000000)
X(default=0, min=-100000, max=1000000)
X2(default=0, min=-100000, max=1000000)
Y(default=0, min=-100000, max=1000000)
Z(default=0, min=-100000, max=1000000)
Z2(default=0, min=-100000, max=1000000)
}
Key
{
4:OP(step=100)
5:OP(step=-100)
}
Body
{
Core() {
N:Chip() {
N:Chip() {
W:Chip() {
W:Jet(power=-a, name=a) {
E:Frame(angle=30) {
E:Jet(angle=-120, power=-SS1) { }
}
}
}
E:Chip() {
E:Jet(power=-b, name=b) {
W:Frame(angle=30) {
W:Jet(angle=-120, power=SS1) { }
}
}
}
S:Frame(angle=30) {
S:Jet(angle=-120, power=PO) { }
}
}
W:Weight() { }
E:Weight() { }
S:RLW(power=100000, option=2) { }
S:RLW(power=-100000, option=2) { }
}
S:Chip() {
S:Chip() {
E:Chip() {
E:Jet(power=-d, name=d) {
W:Frame(angle=30) {
W:Jet(angle=-120, power=SS2) { }
}
}
}
W:Chip() {
W:Jet(power=-c, name=c) {
E:Frame(angle=30) {
E:Jet(angle=-120, power=-SS2) { }
}
}
}
N:Frame(angle=30) {
N:Jet(angle=-120, power=-PO) { }
}
}
E:Weight() { }
W:Weight() { }
N:RLW(power=100000, option=2) { }
N:RLW(power=-100000, option=2) { }
}
E:Weight(option=8) {
W:Chip(angle=90) {
S:Chip() {
S:Chip() {
E:Chip() { }
}
}
N:Chip() { }
}
}
W:Weight(option=8) {
E:Chip(angle=90) {
N:Chip() { }
S:Chip() {
S:Chip() {
W:Chip() { }
}
}
}
}
}
}
Script
{IF _KEY(11)>0{H = H +1}
IF H = 2 {H = 0}
PO = (_ANALOG(1)*100)+Z
if _H()>(0){
a = (((_H(A)-2)*60000)-OP )
B=( ((_H(B)-2)*60000)-OP)
C =( ((_H(C)-2)*60000)-OP)
D= (((_H(D)-2)*60000)-OP)
}
if _H()<(0){}
IF H = 1 {X=0
Z=0
Y=0}
IF H = 0 {
IF _ANALOG(5) =0 {X = _VX(core)*100000}
}
IF H = 0 {
IF _ANALOG(1) =0 {Z = _VZ(core)*100000}
}
IF H = 0 {
IF _ANALOG(0) =0 {Y = _WY(core)*1000}
}
SS1 =((- _ANALOG(0)*10)+( _ANALOG(5)*100)-Y)+X
SS2 =( (_ANALOG(0)*10)+( _ANALOG(5)*100)+Y)+X
}
freek4ever- Tank
- Posts : 97
Join date : 2011-08-26
Age : 27
Location : nederland holand
freek4ever- Tank
- Posts : 97
Join date : 2011-08-26
Age : 27
Location : nederland holand

RA2lover- Walker

- Posts : 382
Join date : 2010-10-11
Age : 29
Location : Brazil

darkeye22- Tank
- Posts : 55
Join date : 2011-06-01
Location : Stuck inside RigidChips trying to find a way out
Re: HAG 01
![]() by freek4ever Thu Dec 22, 2011 4:33 pm
by freek4ever Thu Dec 22, 2011 4:33 pm
sory i played whit it and get amazed every time
but stil it is amazing
but stil it is amazing
freek4ever- Tank
- Posts : 97
Join date : 2011-08-26
Age : 27
Location : nederland holand
RigidChips :: Rigid-Chips :: Files :: Others
Page 1 of 1
Permissions in this forum:
You cannot reply to topics in this forum